CARA: Concept-Aware Risk Attention for Interpretable Collision Prediction
Oct 5, 2025·,, ,,,,,·
1 min read
,,,,,·
1 min read
Zhishan Tao
Ruoyu Wang
Yucheng Wu
Enjun Du
Yilei Yuan
Sherwin Ho
Yue Su
Jinbo Su
Yi Hong*
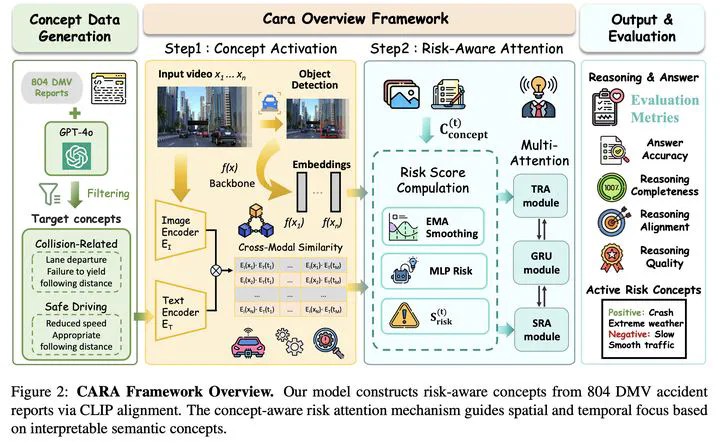 Image credit: Unsplash
Image credit: UnsplashAbstract
Collision detection in autonomous driving faces a critical interpretability challenge, as existing systems remain largely opaque in safety-critical decision-making. Current methods either rely on post-hoc explainers with limited fidelity or require costly manual annotations, failing to reconcile predictive accuracy with interpretability. To address these limitations, we propose leveraging natural language processing to extract interpretable risk concepts from real-world accident reports, bridging the semantic gap between textual accident descriptions and visual collision scenarios. We introduce CARA (Concept-Aware Risk Attention), a framework that uses language model-driven concept extraction and multimodal language-vision alignment to automatically discover risk-aware semantic concepts. Unlike traditional feature-driven attention mechanisms, CARA grounds spatial-temporal attention allocation in these human-understandable concepts derived from linguistic accident analysis. Experiments on standard benchmarks demonstrate that CARA achieves competitive accuracy and early warning capability while providing transparent, concept-based explanations for risk assessment in safety-critical AI systems.
Type
Click the Cite button above to demo the feature to enable visitors to import publication metadata into their reference management software.